
Publications
Fast Image-Based Localization using Direct 2D-to-3D Matching
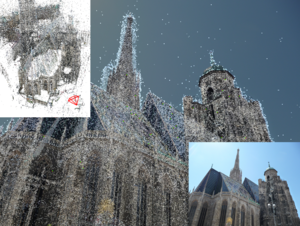
Estimating the position and orientation of a camera given an image taken by it is an important step in many interesting applications such as tourist navigations, robotics, augmented reality and incremental Structure-from-Motion reconstruction. To do so, we have to find correspondences between structures seen in the image and a 3D representation of the scene. Due to the recent advances in the field of Structure-from-Motion it is now possible to reconstruct large scenes up to the level of an entire city in very little time. We can use these results to enable image-based localization of a camera (and its user) on a large scale. However, when processing such large data, the computation between points in the image and points in the model quickly becomes the bottleneck of the localization pipeline. Therefore, it is extremely important to develop methods that are able to effectively and efficiently handle such large environments and that scale well to even larger scenes.
Global Structure Optimization of Quadrilateral Meshes
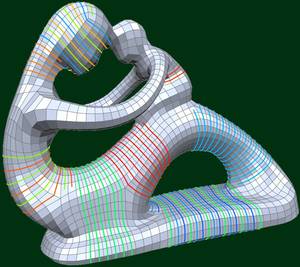
We introduce a fully automatic algorithm which optimizes the high-level structure of a given quadrilateral mesh to achieve a coarser quadrangular base complex. Such a topological optimization is highly desirable, since state-of-the-art quadrangulation techniques lead to meshes which have an appropriate singularity distribution and an anisotropic element alignment, but usually they are still far away from the high-level structure which is typical for carefully designed meshes manually created by specialists and used e.g. in animation or simulation. In this paper we show that the quality of the high-level structure is negatively affected by helical configurations within the quadrilateral mesh. Consequently we present an algorithm which detects helices and is able to remove most of them by applying a novel grid preserving simplification operator (GP-operator) which is guaranteed to maintain an all-quadrilateral mesh. Additionally it preserves the given singularity distribution and in particular does not introduce new singularities. For each helix we construct a directed graph in which cycles through the start vertex encode operations to remove the corresponding helix. Therefore a simple graph search algorithm can be performed iteratively to remove as many helices as possible and thus improve the high-level structure in a greedy fashion. We demonstrate the usefulness of our automatic structure optimization technique by showing several examples with varying complexity.
Procedural Modeling of Interconnected Structures
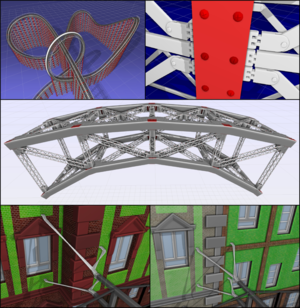
The complexity and detail of geometric scenes that are used in today's computer animated films and interactive games have reached a level where the manual creation by traditional 3D modeling tools has become infeasible. This is why procedural modeling concepts have been developed which generate highly complex 3D models by automatically executing a set of formal construction rules. Well-known examples are variants of L-systems which describe the bottom-up growth process of plants and shape grammars which define architectural buildings by decomposing blocks in a top-down fashion. However, none of these approaches allows for the easy generation of interconnected structures such as bridges or roller coasters where a functional interaction between rigid and deformable parts of an object is needed. Our approach mainly relies on the top-down decomposition principle of shape grammars to create an arbitrarily complex but well structured layout. During this process, potential attaching points are collected in containers which represent the set of candidates to establish interconnections. Our grammar then uses either abstract connection patterns or geometric queries to determine elements in those containers that are to be connected. The two different types of connections that our system supports are rigid object chains and deformable beams. The former type is constructed by inverse kinematics, the latter by spline interpolation. We demonstrate the descriptive power of our grammar by example models of bridges, roller coasters, and wall-mounted catenaries.
Walking On Broken Mesh: Defect-Tolerant Geodesic Distances and Parameterizations
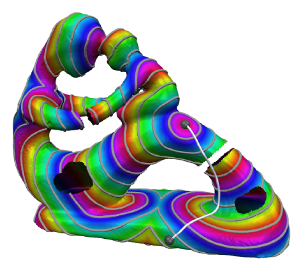
Efficient methods to compute intrinsic distances and geodesic paths have been presented for various types of surface representations, most importantly polygon meshes. These meshes are usually assumed to be well-structured and manifold. In practice, however, they often contain defects like holes, gaps, degeneracies, non-manifold configurations – or they might even be just a soup of polygons. The task of repairing these defects is computationally complex and in many cases exhibits various ambiguities demanding tedious manual efforts. We present a computational framework that enables the computation of meaningful approximate intrinsic distances and geodesic paths on raw meshes in a way which is tolerant to such defects. Holes and gaps are bridged up to a user-specified tolerance threshold such that distances can be computed plausibly even across multiple connected components of inconsistent meshes. Further, we show ways to locally parameterize a surface based on geodesic distance fields, easily facilitating the application of textures and decals on raw meshes. We do all this without explicitly repairing the input, thereby avoiding the costly additional efforts. In order to enable broad applicability we provide details on two implementation variants, one optimized for performance, the other optimized for memory efficiency. Using the presented framework many applications can readily be extended to deal with imperfect meshes. Since we abstract from the input applicability is not even limited to meshes, other representations can be handled as well.
Efficient and Accurate Urban Outdoor Radio Wave Propagation
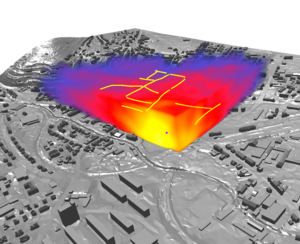
Simulating Radio Wave Propagation using geometrical optics is a well known method. We introduce and compare a simplified 2D beam tracing and a very general 3D ray tracing approach, called photon path tracing. Both methods are designed for outdoor, urban scenarios. The 2D approach is computationally less expensive and can still model an important part of propagation effects. The 3D approach is more general, and not limited to outdoor scenarios, and does not impose constraints or assumptions on the scene geometry. We develop methods to adapt the simulation parameters to real measurements and compare the accuracy of both presented algorithms.
Online Estimation of B-Spline Mixture Models From TOF-PET List-Mode Data
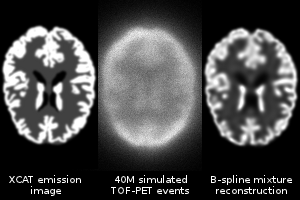
In emission tomography, images are usually represented by regular grids of voxels or overlapping smooth image elements (blobs). Few other image models have been proposed like tetrahedral meshes or point clouds that are adapted to an anatomical image. This work proposes a practical sparse and continuous image model inspired from the field of parametric density estimation for Gaussian mixture models. The position, size, aspect ratio and orientation of each image element is optimized as well as its weight with a very fast online estimation method. Furthermore, the number of mixture components, hence the image resolution, is locally adapted according to the available data. The system model is represented in the same basis as image elements and captures time of flight and positron range effects in an exact way. Computations use apodized B-spline approximations of Gaussians and simple closed-form analytical expressions without any sampling or interpolation. In consequence, the reconstructed image never suffers from spurious aliasing artifacts. Noiseless images of the XCAT brain phantom were reconstructed from simulated data.
A Sketching Interface for Feature Curve Recovery of Free-Form Surfaces
Special issue on The 2009 SIAM/ACM Joint Conference on Geometric and Physical Modeling
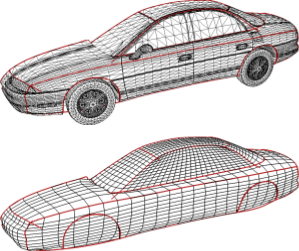
In this paper, we present a semi-automatic approach to efficiently and robustly recover the characteristic feature curves of a given free-form surface where we do not have to assume that the input is a proper manifold. The technique supports a sketch-based interface where the user just has to roughly sketch the location of a feature by drawing a stroke directly on the input mesh. The system then snaps this initial curve to the correct position based on a graph-cut optimization scheme that takes various surface properties into account. Additional position constraints can be placed and modified manually which allows for an interactive feature curve editing functionality. We demonstrate the usefulness of our technique by applying it to two practical scenarios. At first, feature curves can be used as handles for surface deformation, since they describe the main characteristics of an object. Our system allows the user to manipulate a curve while the underlying non-manifold surface adopts itself to the deformed feature. Secondly, we apply our technique to a practical problem scenario in reverse engineering. Here, we consider the problem of generating a statistical (PCA) shape model for car bodies. The crucial step is to establish proper feature correspondences between a large number of input models. Due to the significant shape variation, fully automatic techniques are doomed to failure. With our simple and effective feature curve recovery tool, we can quickly sketch a set of characteristic features on each input model which establishes the correspondence to a pre-defined template mesh and thus allows us to generate the shape model. Finally, we can use the feature curves and the shape model to implement an intuitive modeling metaphor to explore the shape space spanned by the input models.
The paper is an extended version of the paper "A sketching interface for feature curve recovery of free-form surfaces" published at the 2009 SIAM/ACM Joint Conference on Geometric and Physical Modeling. In this extended version, we presend a second application where we use the recovered feature curves as modeling handles for surface deformation.
Realtime Compositing of Procedural Facade Textures on the GPU

The real time rendering of complex virtual city models has become more important in the last few years for many practical applications like realistic navigation or urban planning. For maximum rendering performance, the complexity of the geometry or textures can be reduced by decreasing the resolution until the data set can fully reside on the memory of the graphics card. This typically results in a low quality of the virtual city model. Alternatively, a streaming algorithm can load the high quality data set from the hard drive. However, this approach requires a large amount of persistent storage providing several gigabytes of static data. We present a system that uses a texture atlas containing atomic tiles like windows, doors or wall patterns, and that combines those elements on-the-fly directly on the graphics card. The presented approach benefits from a sophisticated randomization approach that produces lots of different facades while the grammar description itself remains small. By using a ray casting apporach, we are able to trace through transparent windows revealing procedurally generated rooms which further contributes to the realism of the rendering. The presented method enables real time rendering of city models with a high level of detail for facades while still relying on a small memory footprint.
Markerless Reconstruction and Synthesis of Dynamic Facial Expressions
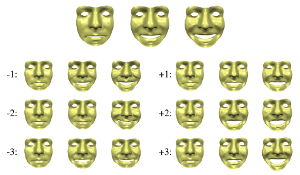
In this paper we combine methods from the field of computer vision with surface editing techniques to generate animated faces, which are all in full correspondence to each other. The inputs for our system are synchronized video streams from multiple cameras. The system produces a sequence of triangle meshes with fixed connectivity, representing the dynamics of the captured face. By carefully taking all requirements and characteristics into account we decided for the proposed system design: We deform an initial face template using movements estimated from the video streams. To increase the robustness of the reconstruction, we use a morphable model as a shape prior to initialize a surfel fitting technique which is able to precisely capture face shapes not included in the morphable model. In the deformation stage, we use a 2D mesh-based tracking approach to establish correspondences over time. We then reconstruct positions in 3D using the same surfel fitting technique, and finally use the reconstructed points to robustly deform the initially reconstructed face.
This paper is an extended version of our paper "Markerless Reconstruction of Dynamic Facial Expressions" which was published 2009 at 3-D Digital Imaging and Modeling. Besides describing the reconstruction of human faces in more detail we demonstrate the applicability of the tracked face template for automatic modeling and show how to use deformation transfer to attenuate expressions, blend expressions or how to build a statistical model, similar to a morphable model, on the dynamic movements.
Pseudo-Immersive Real-Time Display of 3D Scenes on Mobile Devices
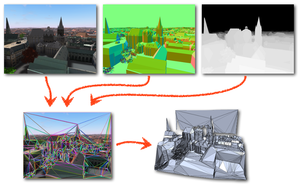
The display of complex 3D scenes in real-time on mobile devices is difficult due to the insufficient data throughput and a relatively weak graphics performance. Hence, we propose a client-server system, where the processing of the complex scene is performed on a server and the resulting data is streamed to the mobile device. In order to cope with low transmission bitrates, the server sends new data only with a framerate of about 2 Hz. However, instead of sending plain framebuffers, the server decomposes the geometry represented by the current view's depth profile into a small set of textured polygons. This processing does not require the knowledge of geometries in the scene, i.e. the outputs of Time-of-flight camera can be handled as well. The 2.5D representation of the current frame allows the mobile device to render plausibly distorted views of the scene at high frame rates as long as the viewing direction does not change too much before the next frame arrives from the server. In order to further augment the visual experience, we use the mobile device's built-in camera or gyroscope to detect the spatial relation between the user's face and the device, so that the camera view can be changed accordingly. This produces a pseudo-immersive visual effect. Besides designing the overall system with a render-server, 3D display client, and real-time face/pose detection, our main technical contribution is a highly efficient algorithm that decomposes a frame buffer with per-pixel depth and normal information into a small set of planar regions which can be textured with the current frame. This representation is simple enough for realtime display on today's mobile devices.
OpenFlipper: An Open Source Geometry Processing and Rendering Framework
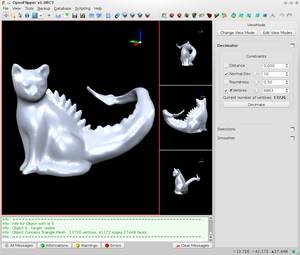
In this paper we present OpenFlipper, an extensible open source geometry processing and rendering framework. OpenFlipper is a free software toolkit and software development platform for geometry processing algorithms. It is mainly developed in the context of various academic research projects. Nevertheless some companies are already using it as a toolkit for commercial applications. This article presents the design goals for OpenFlipper, the central usability considerations and the important steps that were taken to achieve them. We give some examples of commercial applications which illustrate the exibility of OpenFlipper. Besides software developers, end users also bene t from this common framework since all applications built on top of it share the same basic functionality and interaction metaphors.
Previous Year (2010)
